





| Specifications | |
|---|---|
| Quantity | 1 pcs |
| Model Number | RX62E |
| For Vehicle Type | Airplanes |
| Remote Control Peripherals/Devices | Receivers |
| RC Parts & Accs | Receivers |
| Material | Composite Material |
| Origin | Mainland China |
| Recommend Age | 12+y |
| Use | Vehicles & Remote Control Toys |
| Certification | CE |
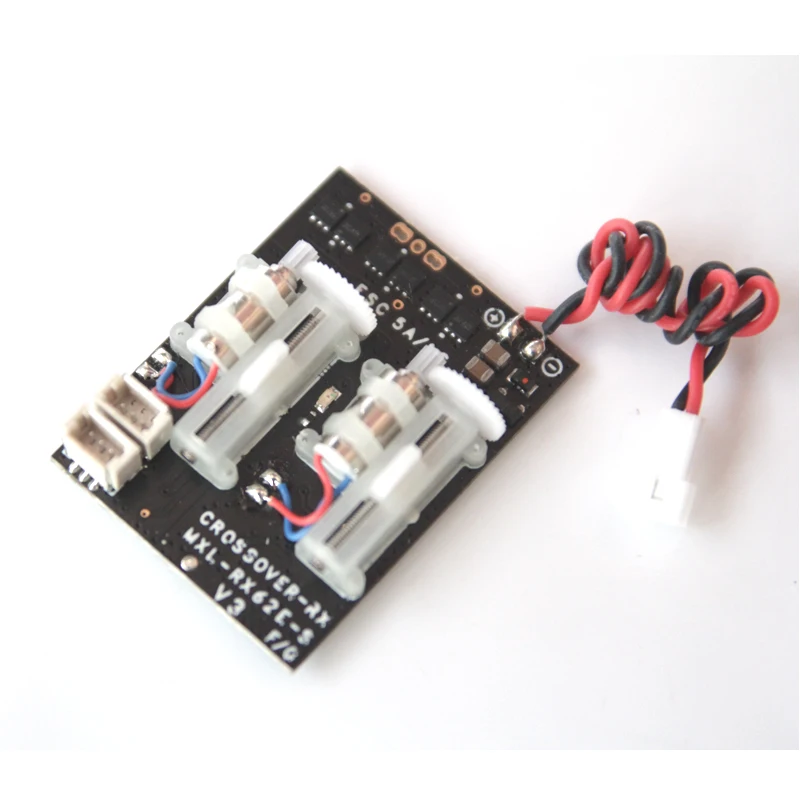
XL-RX62E-X V3.1 series receivers are developed on the basis of MXL-RX62H-X V3.0, on which are integrated with 5A/1S brushless ESC, the length of the board is only 8.2mm longer than that of MXL-RX62H board, in this case, MXL-RX62E-X receiver also can be installed on micro model airplanes very easily and bring customer brushless flight fun. Besides, some versions of MXL-RX62E-X support TELEM function. We can supply 4 versions in total at present.
The package includes:
One RX62E-S or RX62E-S-G Futaba SFHSS compatible receiver
One soldered 2.0mm 3P connector and one not soldered 2.0mm 3P plug and related heat shrink tubes.
-
Super small: 24.3*32.2*7.8mm(not including antenna)
-
Super light: 4.28g including power cable;
-
Working voltage: 3.0~5.0V;
-
DCDC-5V/1A boosting power;
-
Supports dual ailerons servo mode (reversed phase);
-
With Built-in 5A/1S brushless ESC;
-
Integrated with SR3X 3-axis( three working modes: off, low sensitivity, high sensitivity)
-
Auto binding;
-
Version D and F2 supports TELEM function;
-
Supports online firmware updating;
-
Supports GUI set up;
-
Ports 5A/1S brushless ESC:
-

-
MXL-RX62E-X-G V3.1 comes with a built-in BLS 5A/1S Brushless ESC.
Auto binding operation:
It is a bit difficult to press the binding button when the receiver is installed inside the fuselage, in this case, we developed auto binding function. After the receiver is powered for 15 seconds and no signal still, the receiver will enter auto binding mode (the slow flashing LED light turns to fast blinking), customer can complete binding operation according to their own transmitter’s instruction.
TELEM function:
TELEM function is useful on monitoring battery voltage, receiver working voltage and its signal strength as well as its working temperature in real-time, through which customer can get working state of receiver and battery discharging state under control, so flying out of control range and over-discharging will rarely happen (for brushless motor rotation speed or flight height monitoring, customer needs to choose a more advanced receiver)
NOTE: The effective control range of TELEM function depends on the transmitter, it is possible that this would happen: the working range of the receiver is far more than TELEM function effective range, it is normal and alright
M-BUS port:
M-BUS port is a multi-functional port for: 1, Firmware updating/ function set up; 2, CH5 signal output; 3, SBUS signal output; 4, Connect an outside sensor from (developing).
How the receiver to connect GUI software (download address: update.crossover-rx.com/mxo.zip)
Customer needs a USB programmer before using GUI software for set up or firmware updating (USB MX-PG02, can be used on MXL-RX62E-X-G, turn the switch to l position), connect one side of the cable to M-BUS port on the receiver, connect the other side of the cable to PC, open GUI software and select the correct port, click “Connect”, then all the functional modules of the receiver will be uploaded and the present set up information will be displayed.
Parameter setup( by using CrossOver-RX Tool software):
1, Set up for different kinds of airplanes
Normal -> normal layout for airplanes
Single Power Wing-Normal -> Single power Wings (use same-phase servo, for example: linear servo)
Single Power Wing- Reverse -> Single power Wings (use reverse-phase servo, such as rotation servo)
V-Tail-Normal -> Single power V tail planes (use same-phase servo, such as linear servo)
V-Tail-Reverse -> Single power V tail planes (use reverse-phase servo, such as rotation servos)
2) Servos Cyde:Set up output signal circle of the servo. The signal circle range is 10~22ms. If the servo works overheating, or shaking, customer can increase the range or use a digital servo instead.
3)M-BUS.TX:Set up output signal of M-BUS.TX;
SBUS -> port M-BUS.TX outputs SBUS signal;
SERVO -> port M-BUS.TX outputs PWM servo signal;

– -> Set up output channels;
Normal -> indicating normal output;
Reverse -> indicating reversed output;
4)Set up PORTX port output(no such port on the product, so you can’t do setup)

-> Set up output channel;
Normal -> indicating normal output;
Reverse -> indicating reversed output;








Reviews
There are no reviews yet.